




智能车又称为无人驾驶汽车,属于轮式移动机器人的一种,是一个集环境感知、路径规划、无人驾驶等多功能于一体的综合系统。智能汽车技术将许多领域联系在一起,如计算机科学、人工智能、图像处理、模式识别和控制理论等。智能汽车与一般所说的无人驾驶不一样,它更多指的是利用GPS 和智能公路技术实现的汽车无人驾驶。这种汽车不需要人去驾驶,因为它装有相当于人的“眼睛”、“大脑”和“脚”的电视摄像机、电子计算机和自动操纵系统之类的装置,这些置都装有很复杂的电脑程序,所以这种汽车能和人一样会“思考”、“判断”、“行走”,可以自动启动、加速、刹车,可以自动绕过地面障碍物在复杂多变的情况下,能随机应变,自动选择最佳方案,指挥汽车正常、顺利地行驶。
电路系统是智能汽车硬件系统的核心,对于本硬件电路系统而言,稳定性是需要优先保证的性能指标,毕竟跑完全程才是取得成绩的前提。在此基础上,还应当考虑智能汽车的动力性、重心及电路板的紧凑性等其他指标。
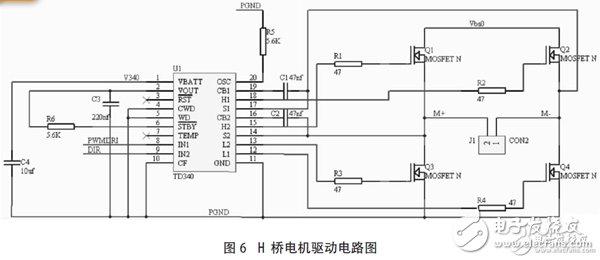
电机驱动模块为智能汽车的行驶提供动力,它的性能直接影响到后轮电机的控制性能,包括加速、减速与制动等性能。本文采用MOSFET 驱动芯片加全桥驱动方案,只需合理的选择MOSFET驱动芯片和功率MOSFET 以保证性能即可。电路图如图6 所示。
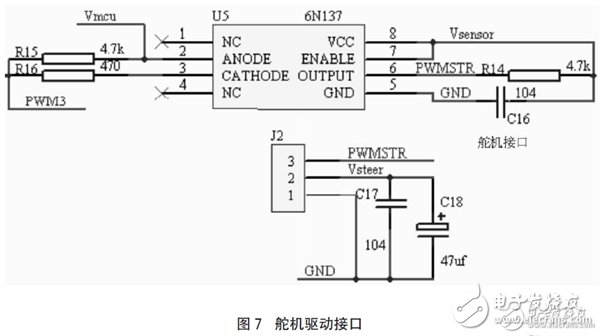
舵机负责智能汽车的转向,舵机模块能否稳定工作直接影响到智能汽车在赛道上高速行驶时的稳定性以及转向时的灵敏度和精确度。舵机工作原理为:舵盘角位由单片机发出的PWM 控制信号的脉宽决定,舵机内部电路通过反馈控制调节舵盘角位。由于自身即为角度闭环控制,而且性能较好,故系统中就不必考虑外加舵机闭环。舵机驱动模块电路如图7 所示。舵机驱动模块同样属于功率部分,用6N137光耦进行信号隔离。
智能车辆是一个涉及多领域的复杂的综合系统,要达到实用的目的,还要进一步深入下研究去,还有许多工作要做。在硬件上还要解决因摄像头自身精度的差异或其因外部因素丢失数据导致影响智能车正常运行的问题,增强抗干扰能力;在软件上,还要进一步优化算法,控制管理系统是智能汽车的核心内容,针对智能汽车的功能需求,对智能汽车控制管理系统关键模块进行了研究,设计的各模块被应用于“飞思卡尔”智能汽车中,文中各图对智能汽车的研究具有启发作用。
汽车收音机应用环境的特殊性对电路性能具有更高的要求,而射频电路的设计是实现高性能的关键。本文介绍了TDA7513的射频电路设计方法,结合实际设计经验提出了提高射频电路EMC特性和噪声特性的设计方法和措施,并指出了射频电路性能测试的注意要点。射频电路是收音机电路设计的重点和难点,如果射频电路设计不好,收音机的噪限灵敏度和信噪比以及别的技术指标都会大幅度下降,甚至只能手动收到很少的几个广播电台,自动搜索电台功能失效。从收音机天线端的广播信号场强来看,信号的动态范围非常大,尤其是汽车收音机所处的环境变化快而大。
收音机射频电路通常很难集成进IC 中,一般由分离元件组成前置低噪声放大器(LNA)和谐振带通滤波器。汽车收音机射频电路的作用从时域上看是要将微弱的广播信号放大,通过自动增益控制电路(AGC)为后级混频器提供稳定的载波信号强度;从频域上看,它要跟踪所选择的电台信号,滤除掉干扰信号如镜像频率(》60dB抑制)和本振频率,改善射频信号质量。
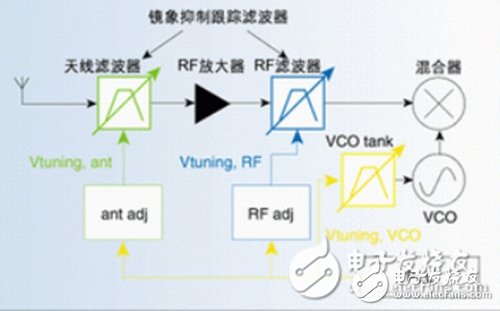
图1是我们设计的汽车收音机射频电路方框图,它由天线滤波器和射频低噪声放大器以及谐振带通滤波器组成。该款汽车收音机的设计目标是噪限灵敏度为 0dBu(30dB S/N)、音频信噪比64dB、自动搜索灵敏度小于10dBu,具有比较强的抗邻频道干扰和其它干扰信号能力,实现MCU全自动调整功能。
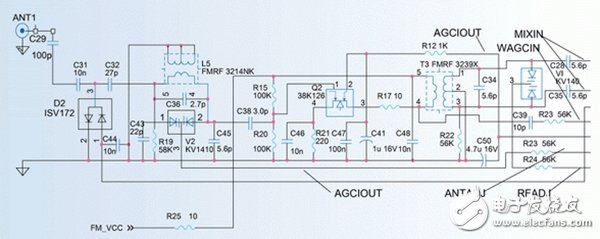
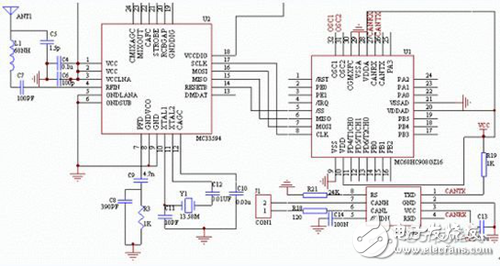
图2是汽车收音机TDA7513的FM收音机部分射频前端电原理图。C31、C32、D2(1SV172)、 C44组成调频波段天线是VHF~UHF频段天线信号衰减器,它是电流控制型元件,随着电流的增大其阻抗减小。它受控于后级 FM宽带AGC和窄带AGC合成产生的FMAGC电流,起控点为天线、C45组成天线MHz左右。该天线滤波器可以人工用无感调批调节射频线,也能够最终靠MCU调节变容二极管V2,以此来实现自动调整功能。
Q2(3SK126)、C38、R15、R20、C46、R21、C47、C41、R17组成低噪声射频放大器,增益为30dB。本设计中选用N沟道场效应管3SK126作射频放大器具有输入阻抗高、增益高和噪声低的优点,而且是电压控制型器件,设计简单。Q2受控于后级FM宽带 AGC和窄带AGC合成产生的FMAGC电压,起控点为天线组成RF谐振带通滤波器,带宽为8MHz左右,T3为FM RF变压器。该带通滤波器一样能人工用无感调批调节T3,也能够最终靠MCU自动调节变容二极管V1。接收机的接收极限是由接收机自身噪声性能决定的,所以在收音机的射频电路中要求尽量选用低噪声元件。
随着无线通信、信息传感技术的迅猛发展和日渐成熟, 通过信息传感微控制器和网络将物品联接成物联网, 以实现物品的自动识别、定位、跟踪、继电器和管理为目标的服务已成为可能。现代汽车中的空调一般是利用手工来控制的,空调只有等到司机进入驾驶室才能开启或关闭,这就使得在炎热的夏天或寒冷的冬天, 刚进入车内时由于空调没有开启,人会感觉到异常的燥热或寒冷,因此设计和制造出能监控车内温度并根据监测到的温度情况来进行提前远程控制开启车内空调系统的设备便提到人们日常生活的议事日程上来,本设计就是为满足这一要求而提出来的。
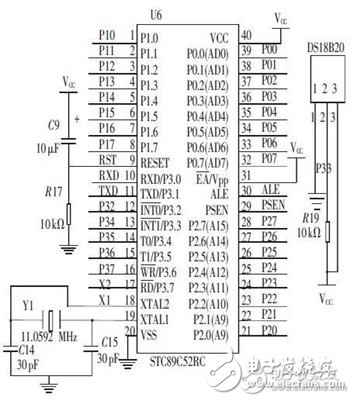
系统中的温度采集模块采用DALLAS 公司生产的高精度、高可靠性的DS18B20 温度传感器, 它具有体积小、硬件开销低、抗干扰能力强、精度高的特点, 采用单总线数据通信, 全数字温度转换及输出, 最高12 位分辨率,精度可达0.5℃, 检测温度范围为-55℃~+125℃, 因此它能满足本系统的设计的基本要求。DS18B20 与微控制器的连接电路见图2 所示。
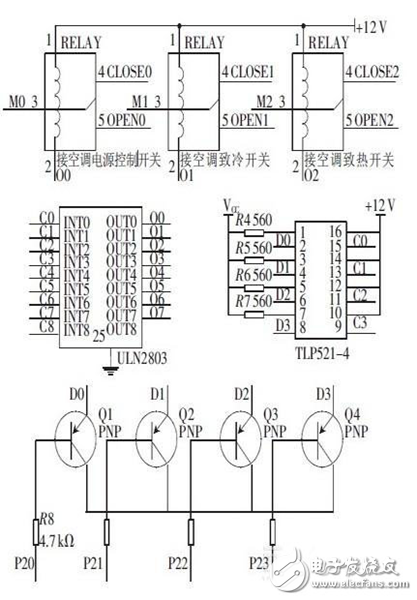
继电器开关模块由TLP521 -4 、ULN2803 和SRD -12VDC 及三极管构成, 由微控制器输出的信号经过三极管构成的开关电路送往TLP521 -4 光耦芯片再通过ULN2803 达林顿管的放大后用来驱动SRD-12DC 继电器, 进而达到控制空调的各种开关的作用, 继电器开关控制模块与微控制器的电路连接图如图3 所示。
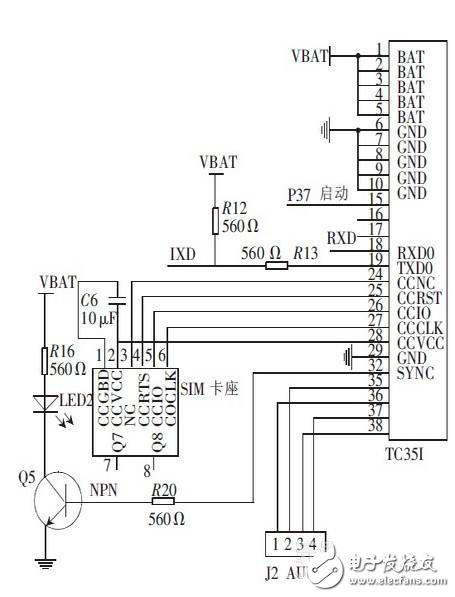
TC35I 模块是Simens 推出的一款双频900/1800 MHz高度集成的GSM 模块。它设计小巧、功耗很低, 可以为很多通信应用提供经济高效的解决方案。它支持EGS900 和GSM1800 双频, 数据传输的内容支持语音、数据、短消息和传真服务, 通信接口采用RS232( 指令和数据的双向传送),供电电源采用单电源3.3 V~5.5 V 的电压, 适用的范围有: 便携电脑的低功耗通信设施、遥测遥感、远程信息处理和通信等工业领域。本系统中TC35I 与微控制器的电路连接图如图4 所示。
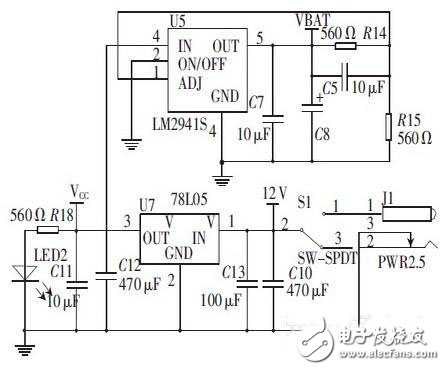
系统电源模块采用了LM78L05 和LM2941S 两控制器将外部12 V 的直流供电电压转换为系统所需要的5 V和4.2 V 的电压, DS18B20连接电路图如图5 所示。
本文就是从物联网的方面出发提出一种以GSM 无线网络为基础, 通过温度传感器, 将用户手机、汽车空调组合成一个小型物联网的应用设计。专为基础的设备汽车空调温度控制管理系统设计方法, 经实际的制作和调试验证, 该系统能够稳定、可靠地运行, 该系统还具有扩展方便、无线传输距离远,可大范围的应用于远距离控制领域。
汽车试验是发现汽车设计开发中很多问题的重要手段,依据试验结果能对汽车各种各样的性能做出客观的评价。作为汽车工业的基础工程之一,汽车试验在汽车工业的整体发展中发挥了及其重要的作用。汽车性能检测系统是汽车试验工程的关键组成部分,它是由若干相互联系、相互作用的传感器和仪器设施等元件,为实现对汽车各项性能的测试而组成的有机整体,汽车检测系统的性能往往对整个汽车试验的效用产生重要影响。
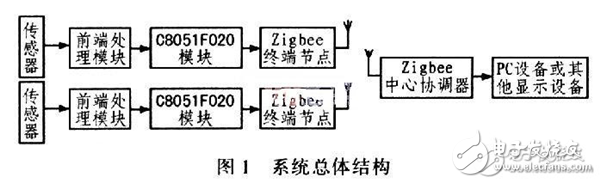
汽车试验最重要的包含动力性能、燃油经济性、操纵稳定性和排放特性等测试项目,主要性能参数有速度、加速度、燃油消耗量、温度以及操纵稳定性试验中的动态运动参数等,通过传感器得到的这些参数的测试信号,经过前端处理模块处理(整形、滤波、放大等) 后送入C805l-F020微处理器中,在单片机内部进行模数转换和数据处理后通过串口实现与Zigbee终端节点的连接,再由终端节点在WLAN中将数据发出,Zi-gbee中心节点接收到数据后经串口与上位机进行通讯。中心节点也可将上位机的命令发送给终端节点,控制终端节点执行。系统总体结构框图如图1所示。
传感器将各种常见的非电量信号转换为电量信号,一般都较微弱,前端处理模块将这些信号做处理后送至单片机的A/D转换端口。本系统共有8路传感器信号,包括2路压变传感器信号、2路-5~+5 V电压信号、2路4~20 mA电流信号和2路热电偶信号的前端处理。其中压变传感器信号和热电偶信号前端处理硬件电路分别如图2和图3所示。
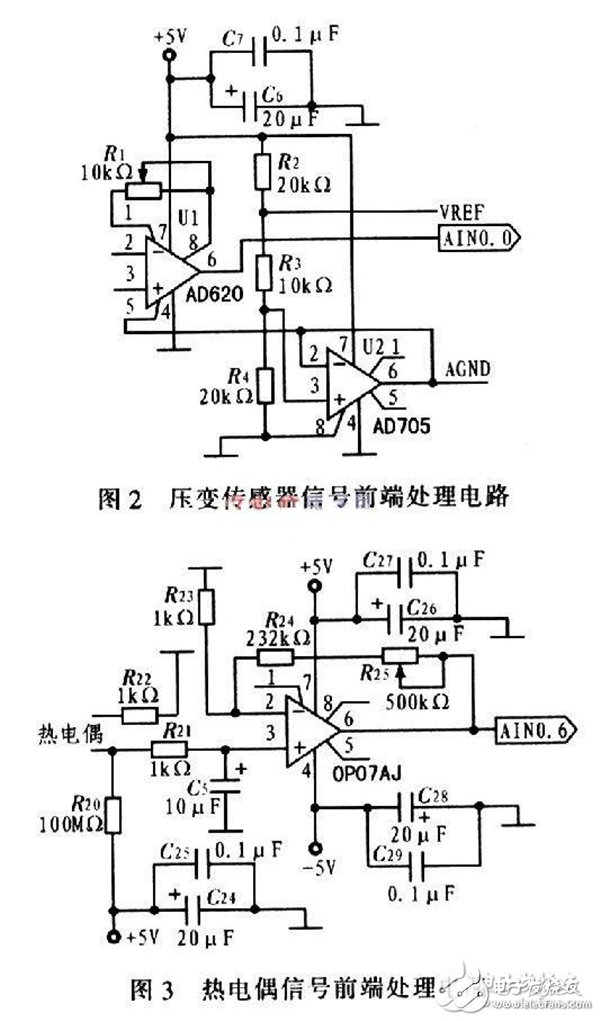
AD620是一款低成本、高精度仪表放大器,仅需1个外部电阻设置增益,增益范围为l~10 000。对压变传感器信号的前端处理采用AD62-0、AD705组成的放大电路,该部分采用单电源供电,AD705是电压跟随器,为AD620提供输出电压的零点。将VREF、AGND送至MCU的8位精度AD-Cl的AINl.0、AINl.1端口,利用软件程序实现该路信号的参考电压和模拟地的计算。热电偶传感器用来测量汽车核心部件温度,其前端处理电路采取OP07的可调增益放大电路。OP07是一种低噪声、非斩波稳零的双极性运算放大器集成电路,有很低的输入失调电压,低失调、高开环增益的特性使得OP07非常适合于高增益的测量设备和放大传感器的微弱信号等。在对精确度要求不高的场合,OP07的失调电压可忽略,该电路中R25和R24用来调整系统放大倍数,在选用不同类别的热电偶时可适当调整两者的阻值。
汽车检测系统初步采用2个终端节点和1个中心协调器组成星状网的拓扑结构,3个节点均选用SZ05-ADV型无线收发模块,Zig-bee终端节点和中心节点通过标准串口分别与C8051F020模块和PC设备相连接,实现数据的无线-ADV是高性能嵌入式无线收发模块,其核心器件是 Freescale公司的MCl3213。它是第2代标准ZigBee无线l引脚LGA封装中集成有低功耗的2.4 GHz RF收发器和8位微控制器,MCl3213器件具有60 kB的闪存,MCl32lx解决方案能在简单的点对点连接到完整的ZigBee网状网络中用作无线连接,小占位面积封装中的无线电收发器和微控制器的组合使其成为成本效益的解决方案,MCl321x中的RF收发器工作在2.4 GHzISM频段,和802.15.4标准兼容,收发器包括低噪音放大器,1 mW的RF输出功率,带VCO的功率放大器(PA),集成的发送/接收开关,板内的电源稳压器以及完全的扩展频谱的编码和译码,MCl32lx中的微控制器基于HCS08系列微控制器单元(MCU),HCS08 A版本,高达60 kB的闪存和4 kB的RAM。
SZ05-ADV嵌入式无线通信模块集成有符合ZIGBEE协议标准的射频收发器和微处理器,其数据接口包括:TTL电平收发接口、标准串口RS2-32 数据接口,能轻松实现数据的广播方式发送和目标地址发送模式。除可实现一般的点对点数据通信功能外,还可实现多点之间的数据通讯。其模块连接电路如图4所示。DATA、RUN、NET、ALARM为SZ05-ADV无线个工作状态指示端口,分别是数据收发、系统运行、网络状态和告警。 SLEEP引脚用来控制管理系统进入低功耗状态,低电平进入低功耗,高电平或悬空正常运行。
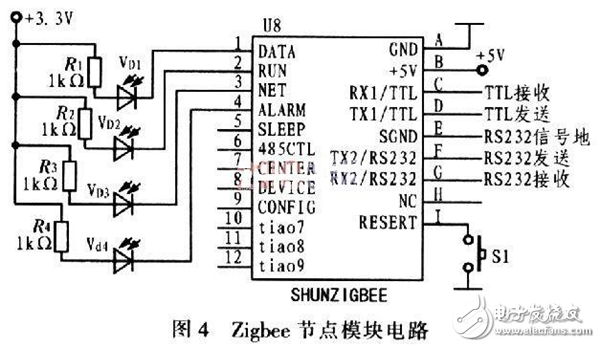
485CTL引脚是485收发控制,模块485接收时低电平输出,发送时高电平输出。CENTER、DEVICE引脚是节点功能配置接口,均为低电平有效,或分别与引脚TIao7、TIao8接跳线个引脚都为高电平或悬空则为路由节点。CONFIG引脚是配置接口,低电平有效,或加跳线帽,可在超级终端中进入系统配置状态。模块标准工作电压为DC-5V,正常工作电压范围为5~12V。数据接口有RS-232和TTL收发2种接口模式。 RS-232串口为TX2、RX2、SGND三线工作模式,TTL为TX1、RXl两线工作模式,TTL电平为3.3V。RESET进入低电平状态3s,系统进入配置状态,高电平或悬空状态则进入工作状态。
本文设计的基于C805lF020和Zigbee无线网络的汽车检测系统实现了汽车试验中数据的无线传输,简化了试验现场布线,提高了试验效率,实验证明了该系统取代传统汽车检测系统的可行性,同时系统的扩展也非常容易,能轻松实现更多功能。本研究侧重于Zigbee 无线网络的应用开发,可为Zigbee技术在传感器网络中的应用提供一定的参考,但局限于软件程序系统和试验的电磁干扰,该系统的同步机制和抗干扰性能有待于进一步研究。
本文就重型车辆上整合TPMS与汽车行驶记录仪等汽车安全配件,提出一种全新的实现方法,以一个电控单元统一协调管理取代以往多个汽车安全用品单独控制,形成汽车安全电控系统。整个汽车安全电控系统由胎压监测系统、倒车雷达装置、汽车行驶记录仪等组成,所有装置均挂接于CAN总线上,共享仪表盘显示。其中重点介绍TPMS的实现原理。接收显示部分的软件由源码公开的微型实时操作系统uCOS-II来管理,使总系统的实时性,可靠性进一步提高。
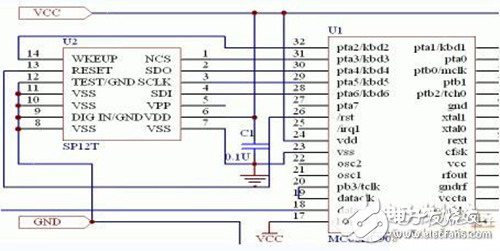
发射模块安装在轮胎内,其测量检测部分连接电路如图2所示。传感器采用Infineon公司的硅压阻式压力传感器SP12T,该芯片胎压测量范围为 50~1400KPa,是一款专门为重型车设计的传感器。SP12T内部集成了压力传感器、温度传感器和电压传感器,提供精确的轮胎状态信息。 908RF2使用内部振荡器,提供这个单片机的工作时钟,增强抗干扰能力。SP12T与908RF2之间通过SPI接口相连。908RF2内部集成发射芯片MC33493,使整板面积、成本降低,同时可靠性更高。发射采用曼彻斯特编码方式,FSK的调制方式,发射频率433.92MHz.
接收显示模块主芯片采用FREESCALE的16位单片机MC9S12DP256,具有5 个CAN接口,2个串口,8路增强型定时器等丰富的内部外设,为系统的升级留下较大的空间。CAN0接口用于接收中转模块发送的信息。接收芯片 MC33594接收距离较近的两前轮的射频信号,并解码后以SPI传输协议送给MC9S12DP256.CAN接口芯片采用MAXIM公司的 MAX3050, 为总线提供差分发射能力,为CAN控制器提供差分接收能力。
本设计硬件上将可靠性高的CAN总线传输与直接式胎压监测系统的无线传输结合,CAN传输避免了用无线中转模块引起的相互之间干扰问题。系统完全实现胎压监测的所有功能,有着广大的实际应用市场。整体可靠性高,稳定性高,成本低,利于移植,方便添加其他功能。
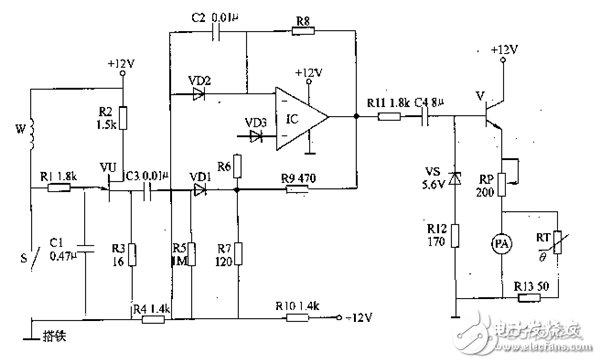
本例介绍的汽车发动机转速表,以单结晶体管和集成运算放大器为主要元器件制作而成,
电路工作原理:该汽车发动机转速表电路由弛张振荡器、微分电路、比较放大器和电流表驱动电路组成,如图所示。
CAN 总线接口电路最重要的包含:单片机、控制器接口、总线收发器和看门狗电路等。采用Philips公司生产的SJA1000控制器和与其配套的 82C250CAN收发器。按照CAN总线物理层协议选择总线介质,设计布线方案,连接成CAN网络。双绞屏蔽线可设两套,在两套介质上一起进行信息传输,接收方只用一个介质。在冗余和非冗余段的连接临界点处进行总线切换。
硬件电路的设计主要是CAN 通信控制器与微处理器之间和CAN总线收发器与物理总线之间的接口电路的设计。CAN通信控制器是CAN总线接口电路的核心,主要完成CAN的通信协议,而CAN总线收发器的基本功能是增大通信距离,提高系统的瞬间抗干扰能力,保护总线,降低射频干扰(RFI),实现热防护等。看门狗电路主要是实现对电路的监控和复位作用。
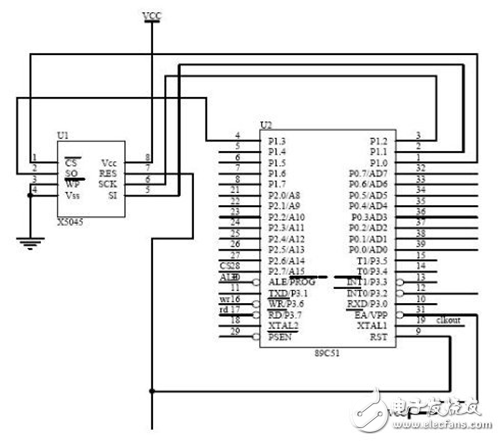
本设计中,应用到单片机为ATMEL公司51系列的89C51,该型号的单片机应用广泛,技术成熟,市场上价格实惠公道,而且在学习中所学到的多为该型号,在本次设计中是首选的芯片。89C51单片机作为系统的核心控制部分,但在本设计中不是重点讲解内容,其有关技术应用和引脚特点功能等,可参照其他有关的资料。设计的电路原理方框大致如下图所示。设计中为防止时钟信号的冲突,对单片机的外接晶振引脚XTAL1、XTAL2不接上外围电路,而是通过控制器 SJA1000的时钟信号脚反馈给单片机。同时,对单片机的复位信号处理,RST引脚接上X5045P的RST脚,复位信号可由X5045P输出,在 X5045P芯片看门狗外围电路的作用下,减少了以往由电阻、电容组成的简易复位电路造成的不精确、延时高等不良作用,使单片机回复到初始状态,完成复位操作。由于在该电路中要用到单片机的存储作用,存储由SJA1000传输过来的处理数据。因此,脚/EA接上高电平,选用片内ROM。对ALE脚,也即地址锁存有效信号除数端是和控制器 SJA1000的ALE脚接通。
控制器SJA1000作为本接口电路中的控制部分,应用本设计中,对于SJA1000和单片机的连接,引脚AD0~AD7是和89C51的输出输入脚 P0.0~P0.7相接;SJA1000的片选信号脚/CS必须由微控制器的P2.7口控制否则这个片选输入必须接到VSS 也能够最终靠地址解码控制例如当地址/数据总线用于其他外围器件,ALE对应ALE,读/写输入脚/WR、/RD,/INT和单片机的/INT0连接,由于在该系统中要用到相同的时钟频率,所以我们要时钟信号引脚CLKOUT和单片机的XTAL1脚相连,达到频率一致的目的;而在复位信号的处理,可以在看门狗外围电路的RST信号输出后再通过和非门电路的相连,很好的实现了电路的复位作用。而对于控制器的收发引脚TX0,TX1与RX0,RX1,在本系统中 TX0、RX0可和收发器82C250的TXD、RXD接通。同时,在和CPU接口中SJA1000 支持对两个著名的微型控制器系列的直接连接80C51 、68xx 。通过SJA1000 的MODE 引脚可选择接口模式Intel 模式 MODE 高;Motorola 模式 MODE 低。在Intel 模式和Motorola 模式里地址/数据总线和读/写控制信号的连接。本设计中,正是使用Intel模式。对SJA1000的Vdd1~Vdd3电源输入脚,外接上驱动+5V电压;而Vss1~Vss3输出接地。设计中,对SJA1000提供16Mkz的晶振。
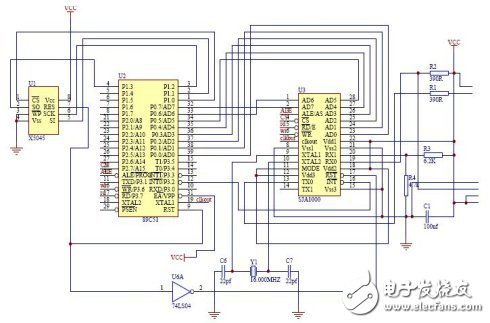
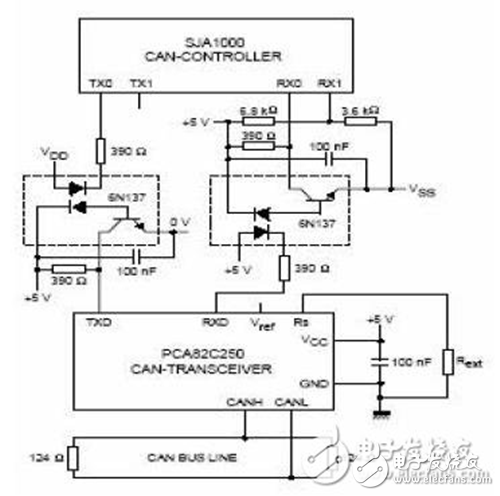
82C250是CAN控制器与物理总线间的接口,能够给大家提供对总线的差动发送和接收能力,与IS011898标准完全兼容,并具有抗汽车环境下的瞬间干扰、保护总线的能力。设计中,收发器的接受、发送脚原理上要和SJA1000的发送、接受脚相连接。但这样一来,两者的电气不一致,造成电气隔离,给通信带来麻烦。为此,在它们之间接上高速光耦合器6N137,避开了电气隔离,更好的实现通信联系。82C250的TXD、RXT就对应接上6N137的输出脚OUT和输入脚 IN;脚Rs作为斜率控制电阻输入端,电阻的大小可以割据总线通信速度适当调整一般在16~140K之间,设计中Rs阻值为47K。在通过接一个 47K电阻分流之后,可以接地。电压引脚Vcc,其电源电压:4.5V〈 Vcc〈 5.5V,在设计中采用5V电压。Vref作为基准电压输出端,设计中可以接地。而CANH,CANL脚是信号的输入输出,实现对电平信号的传送,通过它们连接上双绞线,完成通信传输。
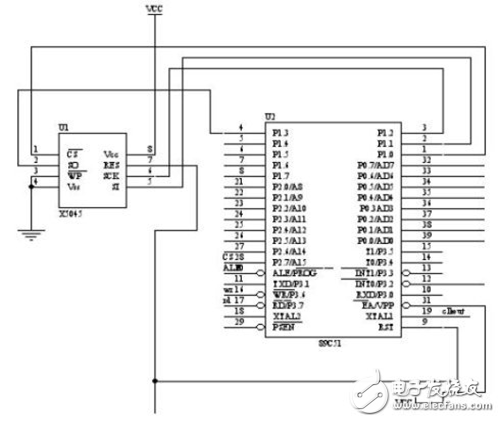
X5045P在本设计中做为复位、监控电路使用,虽然增加了电路连接的复杂和成本,但对于电路的稳定和可靠性有起到非常大的作用,是系统中必不可少的部分。对X5045的操作是通过4根口线CS、SCK、SI和SO进行同步串行通信来完成的。SCK是外部输入的同步时钟信号。在对芯片定改指令或数据时,时钟前沿将SI引脚信号输入;在读邮数据时,时钟后沿将数据位输出到SO引脚上。数据的输入/输出都是高位在先。在设计中,/CS脚和单片机P1.0、 SI、 SCK、SO、RST分别与单片机的引脚P1.0~P1.3、RST连接。对于不用到的引脚,可以直接和地相连。电路设计如下:
欲了解视频监控相关解决方案与电路图设计,可关注电子发烧友荣誉出品的Designs of week栏目:
设计中,对系统的电源都一致采用DC+5V电压,光耦部分电路所采用的两个电源Vcc和Vdd必须完全隔离。为此,设计电源如下所示:
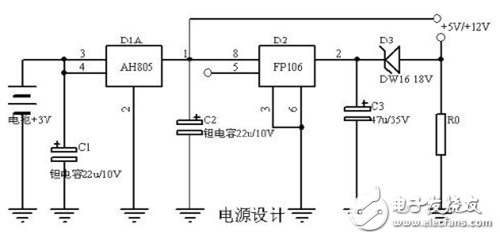
它由AH805升压模块及FP106升压模块组成。AH805是一种输入1.2~3V,输出5V的升压模块,在3V电池供电时可输出100mA电流。 FP106是贴片式升压模块,输入4~6V,输出固定电压为291V,输出电流可达40mA,AH805及FP106都是一个电平控制的关闭电源控制端。两节1.5V碱性电池输出的3V电压输入AH805,AH805输出+5V电压,其一路作5V输出,另一路输入FP106使其产生28~30V电压,经稳压管稳压后输出+12V电压。从图中能够准确的看出,只要改变稳压管的稳压值,就可以获得不同的输出电压,使用十分灵活。FP106的第⑤脚为控制电源关闭端,在关闭电源时,耗电几乎为零,当第⑤脚加高电平2.5V时,电源导通;当第⑤脚加低电平0.4V时,电源被关闭。可以用电路来控制或手动控制,若不需控制时,第⑤脚与第⑧脚连接。

在本电路原理中,控制单元以单片机AT89C51为核心,选用器件SJA1000作为CAN控制器,并选用芯片82C250和6N137、X5045P作为CAN控制器接口和光耦合隔离、复位电路。在实际中,应注意以下几个问题
1. SJA1000的中断请求信号INT在中断允许且有中断发生时,由高电来此跳变到低电平,所以INT和AT0C51的INT0直接相连。片选信号CS和单片机引脚P2.7相连,当CS接到低电平时,SJA1000被选中,CPU可对SJA1000进行读/写操作。为增强CAN总线节点的抗干扰的能力。 SJA1000的TX1脚悬空,RX1引脚的电位必须维持在约0.5VCC上,否则,将不能形成CAN协议要求的电平逻辑。
2. SJA1000的TxD和RxD并不是直接与82C250的TxD和RxD相连而是通过高速光耦合6N137后与82C250相连,这样就可以很好的实现了总线上个CAN节点的电气隔离,不过应该特别说明一点的是光耦部分电路所采用的两个电源Vcc和Vdd必须完全隔离,否则采用光耦也就失去了意思。电源的完全隔离可采用小功率电源隔离模块或带多5V隔离输出的开关电源模块实现,这些部分虽然增加了节点的复杂,但是却提高了节点的稳定性和安全性,保护 CAN控制器正常工作。
现场总线标准及其技术日益成为国际自动控制领域关注的一大焦点,其原因是它改变了传统控制管理系统的结构,形成了全新的网络集成分布式控制系统。在我国,现场总线已发展到推广应用阶段,中国慢慢的变成了各种现场总线激烈争夺的重要战场。因此研究现场总线技术及其产品就显得很重要。本文正是基于控制器 SJA1000和82C250收发器的基础上,外接上看门狗电路芯片X5045P及高速光耦合器6N137,设计CAN总线接口电路,该电路理论上很好的实现了设计原理要求。该设计简单明了,在电路实现时,还需考虑各模块间的接地、屏蔽等诸多问题。PCA82C250提供对物理总线的符合CAN电气协议的差动发送和接收功能,另外,它具有的电流限制电路,还提供了对总线的进一步的保护功能。通过 82C250与物理总线进行连接,可使总线个节点的挂接。对于CAN控制器及带有CAN总线并不是一定要使用的器件,因为多数CAN控制器均具有配置灵活的收发接口并允许总线故障,只是驱动能力一般只允许20~30个节点连接在一条总线上。
Copyright © 爱游戏体育平台赞助马竞官方app,合作伙伴版权所有 网站地图 | 技术支持  苏ICP备15051970号-1
苏ICP备15051970号-1
